|
Ian Pedroza Hello! I'm a fourth-year undergraduate in the Jerome Fisher M&T Program at Penn, and a Robotics Accelerated Master's in the Penn GRASP Lab. My work and interests are towards generalist robot learning policies for fine-grained manipulation tasks. At Penn, I'm a research assistant in the Perception, Action, and Learning (PAL) Group , under Professor Dinesh Jayaraman, where I work on imitation learning and foundation models for robotic manipulation. I previously interned at Daxo Industries developing imitation learning pipelines for agricultural robotics. |

|
Research & ProjectsI strongly believe in the need for generalizable, flexible policies that can enable adaptation to various environments, embodiments, and task specifications. My work focuses on imitation learning, reinforcement learning, and foundation models for robotics, with implementations across various real robots and simulation environments. |
|
|
ZeroMimic: Distilling Robotic Manipulation Skills from Web VideosAs research assistant for the Perception, Action, and Learning (PAL) Group October 2024 - December 2024 project page / video
Imitation learning from egocentric human web videos for zero-shot deployment on household robotic manipulation tasks.
|
|
|
TAMOLS-RL: Hierarchical Reinforcement Learning with Trajectory Optimization for Unitree Go2October 2024 - December 2024 github / paper
Multi-level controller, featuring a high-level footstep trajectory optimizer and a low-level reinforcement learned joint controller to traverse extreme terrain.
|
|
|
Learning and Planning within a Deformable World ModelOctober 2024 - December 2024 github / paper
Vision transformer-based dynamics model to predict deformable object state changes in MIT Plasticine Lab. Planned within the learned latent space to produce actions that reach a desired target shape. |
|
|
Imitation Learning for Apple Harvesting on a Soft RobotAs intern for Daxo Industries | VC-backed AgTech Soft Robotics Start-up May 2024 - August 2024 company website
Custom tendon-driven soft robot for vacuum-based apple harvesting.
|
|
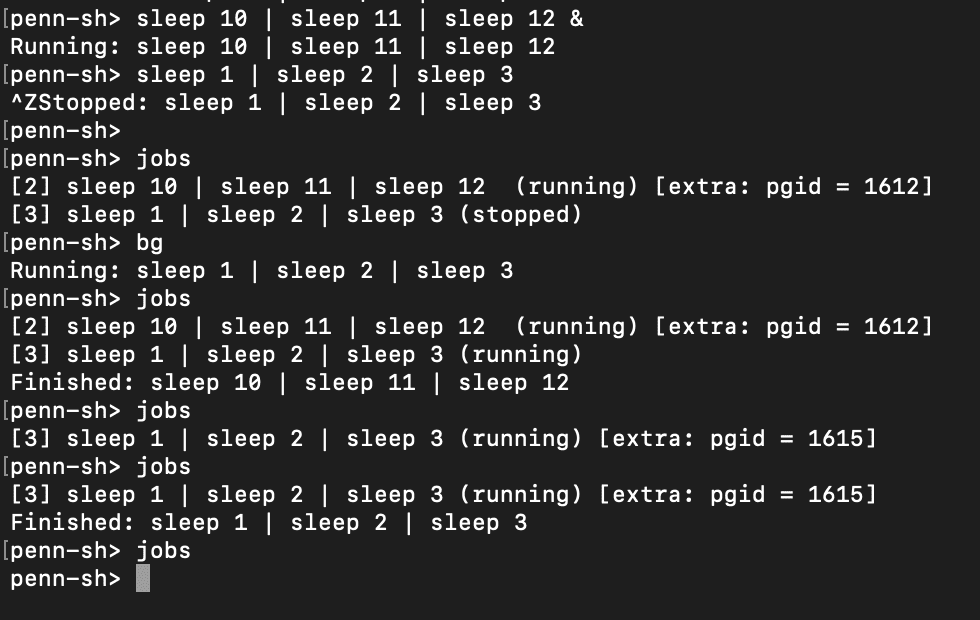
PennOS: UNIX-like OS implementation in CFebruary 2024 - April 2024
From-scratch UNIX-like operating system in C with a multithreaded priority-based scheduler, supporting shell interactions and external storage management via a FAT file system.
|